UNY sukseskan Industry 5.0 dengan memberikan Teleoperated Spraying Robot

{kind=link}
Saatnya pertanian didukung oleh teknologi robotika
Banyak yang berbicara tentang Industry 4.0, Society 5.0, dan juga Education 4.0, namun sejujurnya dari mana kita akan masuk dan sektor apa yang perlu diperkuat? Pertanyaan ini sulit untuk dijawab secara lugas, mengingat berbagai kepentingan harus berjalan beriringan. Merujuk pada SDGs, sektor yang perlu diperkuat juga harus berpusat pada no poverty dan no hungry. Oleh karena itu UNY sepakat untuk mendukung rencana tersebut dengan menggunakan teknologi robotika untuk pertanian.
Temuan yang sangat membantu petani saat ini salah satunya ialah robot penyemprot budidaya hortikultura. Robot ini secara nyata memberi manfaat besar bagi masyarakat berupa pemenuhan protein, mineral, dan serat. Robot ini secara otomatis membantu petani dalam memperoleh hasil panen terbaik. Di negara tropis seperti Indonesia, mempertahankan hasil tinggi, beradaptasi dengan perubahan musim kemarau ke hujan maka perawatan tanaman intensif terus diperlukan, seperti pemupukan, penyiangan, penyemprotan, dan pemangkasan untuk menghasilkan hortikultura yang sehat secara efektif. Salah satu tanaman hortikultura ialah tanaman cabai.
Perawatan cabai membutuhkan sistem rekayasa yang efektif untuk menentukan target yang akan disemprotkan. Sementara itu, jaminan kualitas tanaman hortikultura diwajibkan oleh undang-undang di banyak negara termasuk kualitas dan ambang pestisada. Penyemprotan yang cepat dan efisien menjadi dasar efisiensi dalam budidaya cabai itu sendiri. Teleoperated Spraying Robot fokus membantu perawatan tanaman cabai yang memiliki nilai ekonomi tinggi dan sebanding dengan biaya budidaya yang diperlukan. Umumnya, penyemprotan cabai pada usia tanaman >65 hari diperlukan tiap 3-4 hari, frekuensi ini akan semakin tinggi jika hujan turun. Dari sisi biaya, penyemprotan cabai memerlukan biaya antara Rp. 15.000 sampai dengan Rp. 37.000 per tangki (18 liter). Biaya semakin menjadi lebih besar jika penyemprotan dilakukan secara manual tentunya juga akan memakan banyak waktu, untuk satu tangki diperlukan rata-rata 12 menit. Durasi tersebut berpotensi lebih lama jika sasaran penyemprotan berbeda, seperti buah, daun, atau batang. Jarak antar guludan, jarak tanam, dan kecepatan penyemprot juga berpengaruh pada durasi penyemprotan dan sangat signifikan terhadap kebutuhan pestisida terlarut.
Oleh sebab itu, Sistem rekayasa yang memungkinkan berupa mekanisasi pertanian melalui terapan robotika adalah Teleoperated Spraying Robot. Robot ini Mengenali keadaan target cabai yang akan disemprot misalnya batang, daun atau buah tanaman juga relevan untuk tindakan efisiensi waktu oleh robot otonom. Tujuan pengenalan target cabai juga berfungsi untuk memastikan pengendalian lingkungan tanaman yang efektif, yang memiliki banyak faktor seperti berlumpur, ukuran gundukan, rimbun, dan menghindari risiko robot menabrak tanaman cabai itu sendiri. Petani kemudian menyemprot sesuai target yang menjadi sumber penyakit dengan fungisida. Namun dalam mengaplikasikan fungisida juga perlu diperhatikan dosis dan ketepatan penyemprotan agar tepat sasaran dan tidak banyak fungisida yang terbuang akibat proses perpindahan sprayer. Dengan menambahkan teknologi deep learning memungkinkan robot penyemprot dapat mengenali target semprot sedangkan pergerakan robot dikendalikan oleh operator mengingat kondisi pesawahan/lingkungan yang heterogen dan tidak terstruktur.
Peta Jalan Penelitian dan Pengembangan Produk
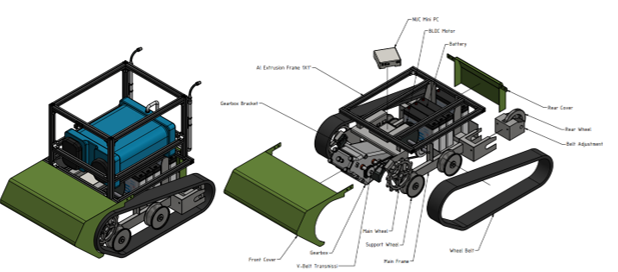
Melihat apa yang akan dikerjakan dalam penelitian ini cukup komprehensif, maka kami perlu untuk mempertegas luaran dari penelitian ini berupa; 1) produk robot penyemprot dengan Tingkat Kesiapan Teknologi (TKT) 5 sebagaiamana desain terlampir. 2) berkontribusi dalam memberikan alternatif algoritma YOLO untuk mekanisasi pertanian yang efektif dan efisien. Adapun luaran karya ilmiah berupa artikel jurnal terindeks SCOPUS Q2 yang akan di submit pada International Journal of Artificial Intelligence. RoboSemp v.1 pada tahun pertama ditargetkan pada level validasi kode (algoritma) dan validasi komponen dalam lingkungan aplikasi, dengan kata lain pada TKT 5. Sebelum produk kami kembangkan telah kami rancang sedemikian rupa sebagaiamana tampak pada Gambar 1. Demikian diutarakan oleh Muslikhin, Ph.D selaku ketua peneliti dengan anggota Dr. Ir. Fatchul Arifin, Dr. Aris Nasuha, Ardy Seto Priambodo, M.Eng., dan Anggun Winursito, M.Eng. serta melibatkan enam mahasiswa.

Gambar 1. Kiri: RoboSemp v.1 tampak depan isometrik dan kanan: detail bagian-bagian robot.
Untuk memenuhi fungsi dalam penentuan target semprot makan disematkan artificial intelligence dalam hal ini menggunakan deep action learning, metode ini dipilih karena dinilai cocok untuk deteksi target penyemprotan. Untuk itu segala bentuk lingkungan dideteksi selain target (daun, buah, dan batang cabai). YOLOv3 digunakan utuk melakukan deteksi yang sebelumnya sistem AI telah melakukan training setidaknya untuk 10.000 gambar dataset. Beberapa hal yang sudah dilakukan terkait dengan pengembangan robot dapat kami gambarkan dalam bentuk peta jalan seperti Gambar 2 berikut.

Gambar 2. Peta jalan pengembagan RoboSemp V.1
Setidaknya ada delapan penelitian yang berkaitan dengan robotika dan sebagian besar telah dipublikasikan dalam jurnal internasional bereputasi. Enam dari delapan proyek yang telah dikerjakan melibatkan artificial intelligence, lebih spesifik untuk grasping robot telah menggunakan algoritma action learning yang kemudian ditingkatkan performanya menjadi deep action learning.

Gambar 3. Detail alur kerja teleoperated RoboSemp v.1 teroptimalisasi deep action learning.
Pada tahun 2022, peneliti ini berupa penelitian awal dari dua tahun yang direncanakan. Secara fungsi robot dapat berjalan dan berfungsi sebagaimana yang dirancang. Selain itu beberapa masukan didapat oleh peneliti dari pengguna, pengembang, termasuk reviewer penelitian.
Pengembangan RoboSemp V.1; UNY melibatkan mitra industri dan kelompok tani
Sedangkan di tahun kedua ditargetkan RoboSemp V.1 mampu didemonstrasikan pada sistem/lingkungan yang sebenarnya atau pada TKT 7. Dalam uji coba nanti, kami akan menggandeng kelompok tani Ijo Makmur, Desa Gondosuli, Muntilan, Magelang di tahun 2023. Mitra industri yang terlibat dalam penelitian ini adalah PT. SEL Techno, beralamat di Sinduadi, Mlati, Sleman. Mitra industri berperan dalam mekanisasi khususnya pembuatan roda dan suspensi, lihat Gambar 4 sebagai detail AI yang diterapkan pada robot.

Gambar 4. Detail AI yang diterapkan pada RoboSemp V.1
Cara terbaik untuk menggabungkan teleoperated dengan teknologi deep learning adalah melalui pembagian sistem kerja robot menjadi dua bagian utama. Bagian pertama teleoperated dimaksimalkan untuk kendali unit robot AGV (automatic guided vehicle) dengan konstruksi rubber track chain. Bagian kedua berupa deep learning yang dipergunakan untuk mendeteksi target semprot. Dalam penelitian ini dibatasi pada empat kelas deteksi; batang, daun, buah, dan guludan. Deep learning yang dipakai menggunakan algoritma YOLO (you only looks once) dengan feature extraction SqueezeNet. Masing-masing dari SqueezeNet perlu untuk mencari yang paling optimal dengan berbagai optimizer, lihat Gambar 5.

Gambar 5. Hasil produk RoboSemp V.1 tahun pertama (2022) dan hasil deteksi target semprot